Synchronization of
8-channel GMSL camera
Synchronization of
8-channel GMSL camera
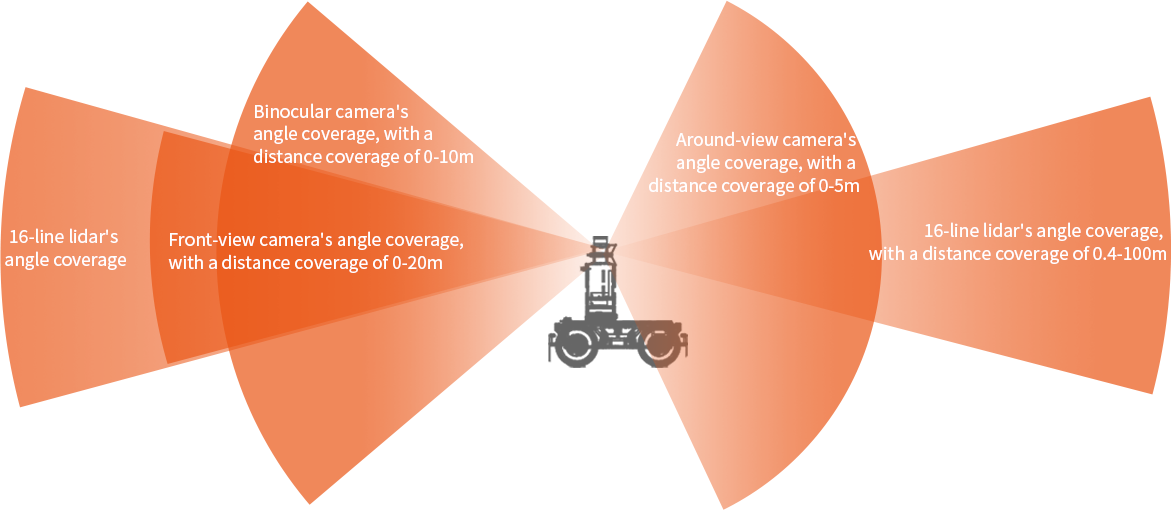
8-channel image data are completely synchronized, to build combination of monocular, binocular, round view and other camera options.Single-chip multi-sensor
clock synchronization
Single-chip multi-sensor
clock synchronization
Synchronize clocks for sensors such as lidar, camera and IMU to reduce latency and response time.Abundant software functions
Abundant software functions
Complete ROS open source demo code, can refer to tutorial mapping.
Sensor fusion SDK, providing more precise data for upper development.
Deep learning acceleration SDK based on YOLOV3, improve 3-5 times of the hash rate in real time.Versatile chassis
Versatile chassis
Differential steering, flexible indoor and outdoor use, full terrain support.
Compact and portable, can be placed in the elevator or car boot.System suppor
System suppor
Linux
Ubuntu18.04
ROSCourses
Courses
Gazebo Open Source Simulation Tutorial
Multi-line lidar Slam tutorial
Building Stereo Vision Tutorial
Visual Odometer Tutorial
Object Recognition Tutorial
Software Function Integration Tutorial


 High performance edge device for autonomous machine based on jetson AGX ORIN.Will release on Q1 2023BASED ON MODULEBASED ON APPLICATION
High performance edge device for autonomous machine based on jetson AGX ORIN.Will release on Q1 2023BASED ON MODULEBASED ON APPLICATION MIIVII provides customized services to develop competitive products for different application scenarios.
MIIVII provides customized services to develop competitive products for different application scenarios.