01
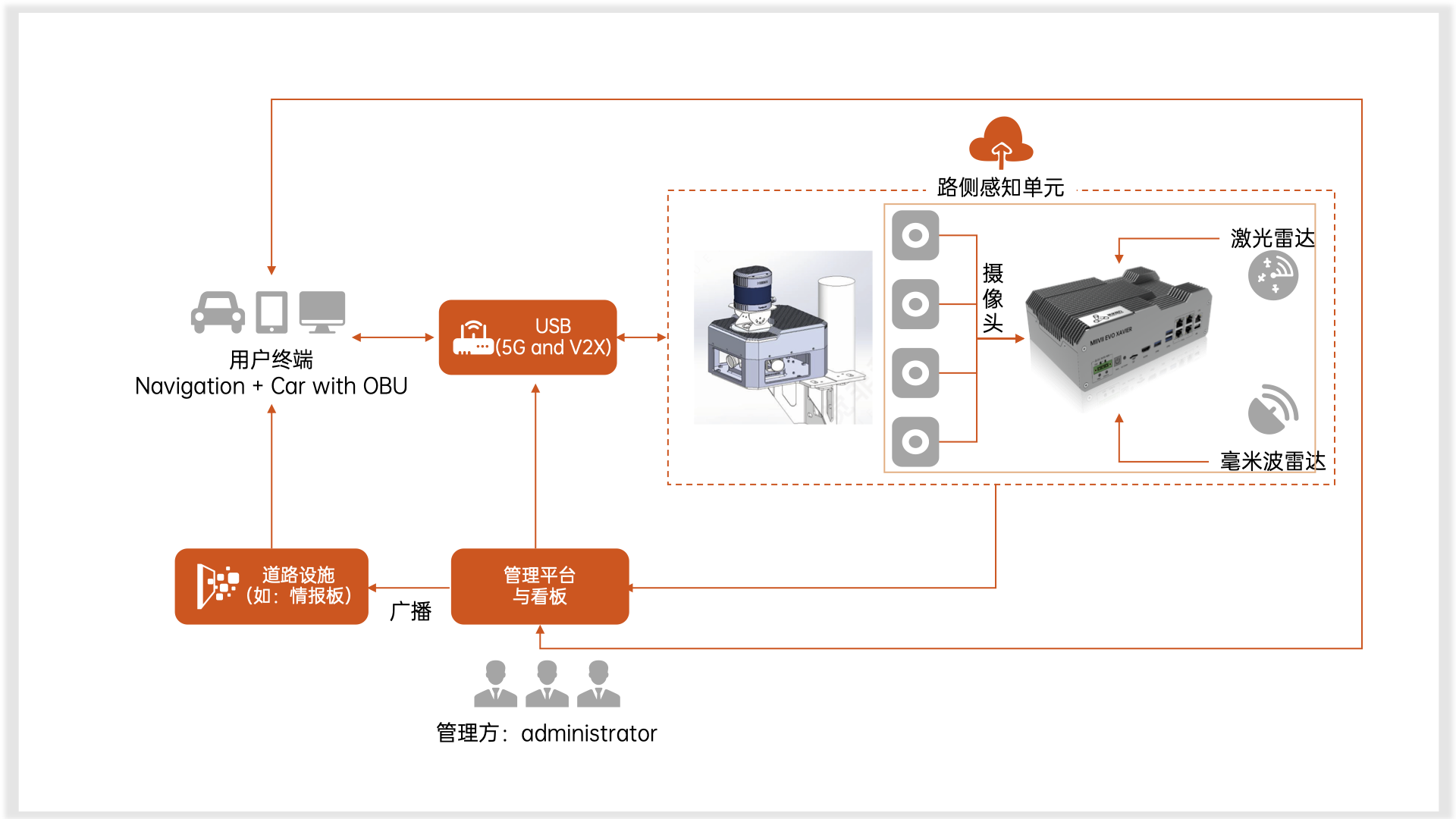
Depending on MIIVII Tech's exclusive core technology - microsecond clock synchronization based on a single-chip module, ultra-low-latency pre-fusion is performed on sensors such as cameras and laser radars.
CUDA parallel computing can achieve GPU-based laser point cloud speedup for alignment and calibration of high-precision point cloud data. The errors can be greatly reduced through this multi-sensor joint calibration.
02
Based on powerful software technology, this solution integrates algorithm models such as target detection and classification and semantic segmentation, and incorporates high-precision lane maps. These components can structure and semantically output traffic events, types, and positioning information, which can then be transmitted to the cloud platform for intelligent perception of the entire scenario.
Additionally, it can communicate with a vehicle in real-time through V2X, enabling stable and centimeter-level precision positioning of the targets.
03
The edge management platform and productivity tools effectively address the 'pole-climbing' deployment and maintenance challenges in roadside perception scenarios of the Cooperative Vehicle Infrastructure System (CVIS).
This platform supports remote device monitoring and Over-The-Air (OTA) updates, allowing for remote viewing of device status and abnormality warnings, free upgrades and rollbacks of system versions via a visual interface, as well as batch image burning and configuration, thus reducing maintenance costs during deployment.


 High performance edge device for autonomous machine based on jetson AGX ORIN.Will release on Q1 2023BASED ON MODULEBASED ON APPLICATION
High performance edge device for autonomous machine based on jetson AGX ORIN.Will release on Q1 2023BASED ON MODULEBASED ON APPLICATION MIIVII provides customized services to develop competitive products for different application scenarios.
MIIVII provides customized services to develop competitive products for different application scenarios.